KTH manufactures the most critical automotive frame components, at a competitive price, worldwide. We accomplish this by continually investigating new methods and technologies that improve production throughput, improving the quality of the parts we manufacture, and reducing the overall parts’ cost.
KTH manufactures the most critical automotive frame components, at a competitive price, worldwide. We accomplish this by continually investigating new methods and technologies that improve production throughput, improving the quality of the parts we manufacture, and reducing the overall parts’ cost.
One technology that we have implemented at KTH is the robotic vision “pick-and-place” system. This automated system can identify and select randomly oriented parts from a bin and, based on robotic programming, decide what the next process for that particular part is and then present the part to the next station.
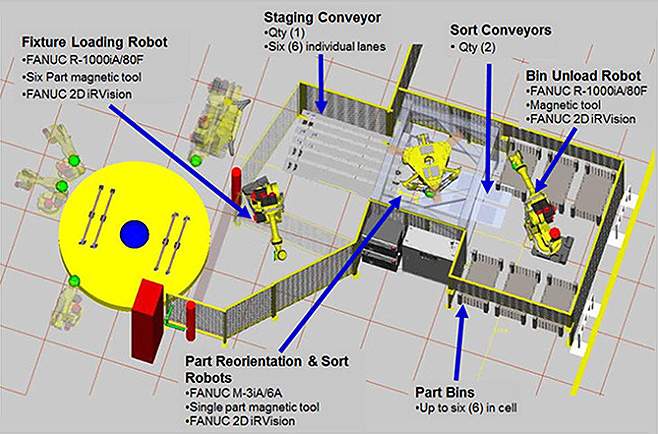
 The example shown uses vision technology to automatically unload parts from a bin and then load the parts into weld fixtures. First, the bin unloading robot uses vision technology to pick randomly oriented parts from a bin and presents the parts to sorting conveyors. Then, a sort robot uses cameras to determine if the parts are left-hand or right-hand parts and orients the parts before placing them in the appropriate lane on a staging conveyor. The system then uses additional cameras to take images of the parts and provides the fixture loading robot with the pick coordinates of each part. A custom gripper on the end of the fixture loading robot will then pick parts from the staging conveyor and place the parts on a weld fixture.
The example shown uses vision technology to automatically unload parts from a bin and then load the parts into weld fixtures. First, the bin unloading robot uses vision technology to pick randomly oriented parts from a bin and presents the parts to sorting conveyors. Then, a sort robot uses cameras to determine if the parts are left-hand or right-hand parts and orients the parts before placing them in the appropriate lane on a staging conveyor. The system then uses additional cameras to take images of the parts and provides the fixture loading robot with the pick coordinates of each part. A custom gripper on the end of the fixture loading robot will then pick parts from the staging conveyor and place the parts on a weld fixture.
Technology Used:
- Fanuc 2D iRvision
- Magswitch Magnetic Clamps
- Custom 6 part gripper design
- Custom 42 part buffer conveyor
- Fanuc M3ia Delta Robot